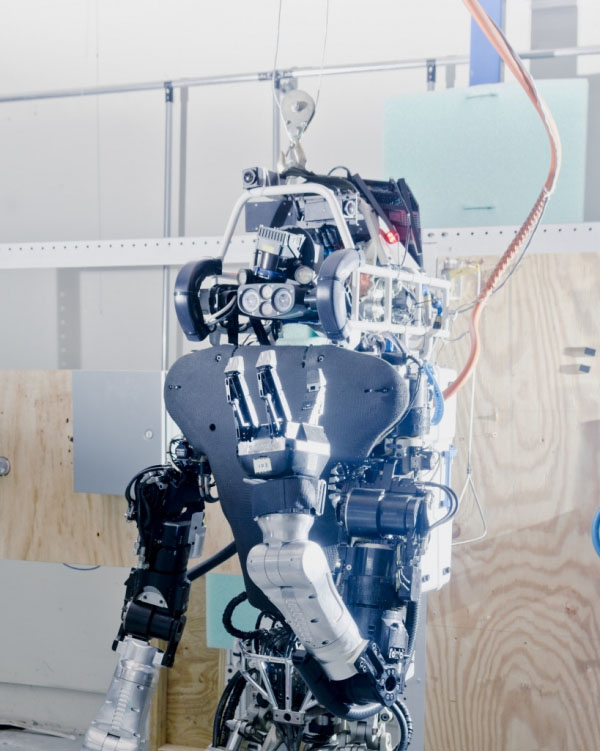
这个晃来晃去的重物看上去就像一个金属娃娃,样子脆弱并且古怪。但这就是Atlas,世界上最精密的机器人之一,它由MIT计算机科学与人工智能实验室Atlas设计团队设计,负责人Russ Tedrake说,“它的操纵系统比战斗机还要复杂”。

Atlas是进入DARPA机器人挑战赛决赛的25个机器人之一,6月将会在加州的波莫纳代表泰得瑞克率领的MIT团队参加为期两周的决赛。与其它进入决赛的机器人一样,它的目标是成为最好的搜救机器人。在对人类过于危险的地域,一个可以举起数百磅重重物和工具车的机器人可以挽救很多人的生命并且不会给人带来危险。这次挑战赛是对这些机器人搜救技能的测验。
MIT团队的Atlas并不是6月里将用双肩承载世界的唯一机器人,它还要与另外五个Atlas机器人角逐。这几个Atlas使用不同软件,但都是对同一母体做出一定改变而成。Atlas除了双手是来自机器人制造商Robotiq公司,其他部分均为谷歌旗下的机器人公司Boston Dynamics (关于这家奇葩公司,雷锋网有过详细介绍) 制作。谷歌将它捐赠给了MIT用于参与比赛。如果要赢得200万奖金,MIT团队的机器人就必须得在一个小时内打开一扇门,旋转一个阀门,用动力钻在墙上钻出一个孔,上几步台阶,还要穿越岩石区和坑洼的地面,处理意外任务。另外,它还要驾驶一辆轿车。
在开赛前,连线的记者前往MIT,为我们带来了关于Atlas的前线报道。
怯场
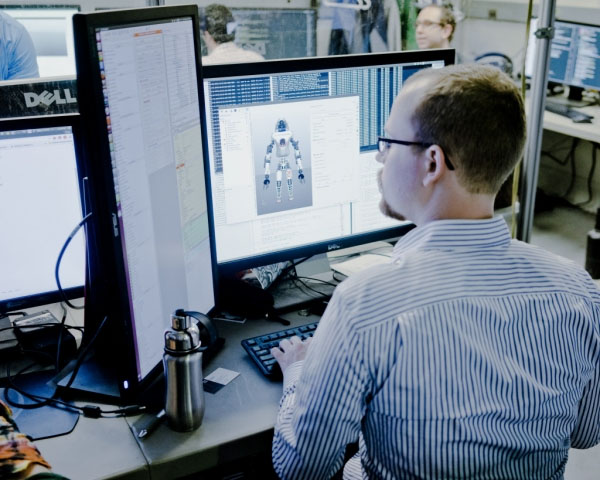
Atlas的测试是在靠近MIT的一个大车库里,里面有一个大型控制中心,和三个博士生:组长帕特·马里恩(Pat Marion);“僚机一号”Andres Valenzuela;“僚机二号”Greg Izatt,另有督查操作指挥员,博士后Scott Kuindersma。
在操作中的屏幕上,他们可以看见Atlas,也能看见Atlas看见的东西,但是他们看不见机器人。机器人在房间那头一个紧关的门后面,身上系着绳子,防止掉落。Atlas在挑战赛和这次演示中的第一个任务是打开紧关的那扇门。泰得瑞克解释说,自最后一个测试以来,他们移动了房间把手的位置。他们只有一周时间测试Atlas在挑战赛中可能遇到的所有问题。
如果可以在控制中心人工直接操控Atlas,这个任务不过是小事一桩,但是MIT团队的机器人为自动操作,所以团队成员不会操纵机器人打开那扇门。团队成员可以做的只是向机器人发送找到门把手并打开门的指令。机器人会怎样操作由所装置的软件程序决定。
这并不容易完成。正常情况下Atlas会用几分钟时间,现在却要用10分钟。他开玩笑说,“机器人看见有人给他拍照害羞了”。首先,测试的进展是良好的。机器人看见了门把手,并且在背部给团队成员发送了将要执行的操作路线,这显示他会将自己的左手移到门把手上,抓住,然后向后拉。过程看上去不错,它的判断完全正确。
Atlas用爪状的手触摸到了扶手,但是,抓空了。
该团队于是重新开始,对Atlas重新设置。这一次,施加的压力过大,脚部的传感器开始反向运动——反作用力使自己离门更远了。就在团队尝试调整的时候,紧闭门后面传来巨大噪音。屏幕上可以看到机器人在颤抖。三个博士生和那位博士后几乎同时奔向操作中心并大叫,“快按恢复建,现在!”
马里恩在键盘上发出了快速指令,机器人平稳的站住了。如果他没有及时的关闭,机器人应该已经摔下去了。在第三次尝试的时候,Atlas抓紧了门把手,一下就把门打开了。人们长舒了一口气。
自动化
MIT团队的成员不知道自己的软件跟其他5个Atlas团队相比会怎样,但是都依赖一个优势,即自动化,也就是那个让他们的机器人在紧闭门前抓破头皮10多分钟的东西。
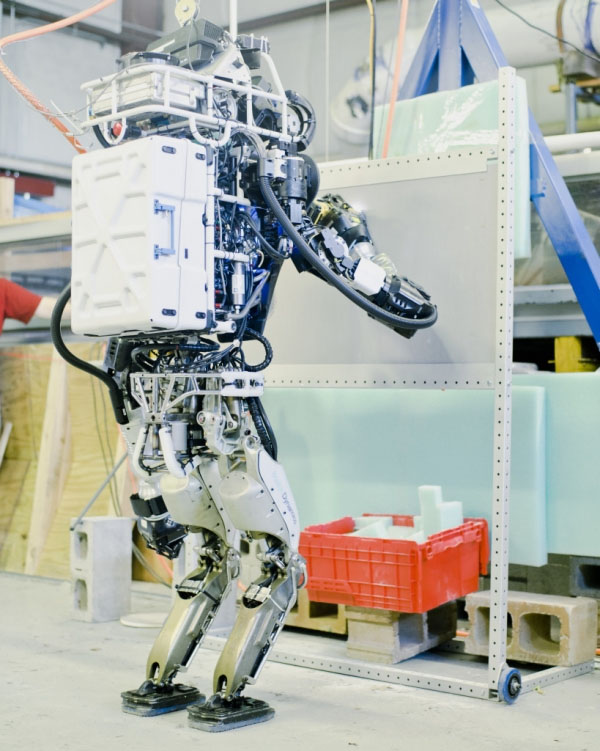
最终MIT团队的Atlas演示完了所有任务(除了驾驶,因为剑桥的法律禁止机器人驾驶)。它转动了门阀,使用机械钻给干板墙钻了孔,甚至还完成了一个意外的任务——它爬上了一个桌子,拿起了一个电话听筒。这个动作听起来容易但是做起来难。机器人需要转身,寻找目标的位置。它的传感器在什么都没有的时候捡起了某个东西。问题来了,这个东西是什么呢?
泰得瑞克解释说,“这个机器人能看见抽象的东西”。“人工操作员通过在机器人程序中定义这些抽象东西帮助实现这一行为”。在屏幕上,这看起来似乎就像模糊的桌状凝聚物上的像素。马里恩和巴伦苏埃拉尝试弄清这些东西;一旦知道他们看到的是什么,他们就能在控制器上的材料清单上做出选择,并在目标的顶部覆盖木质或塑料的几何形状。尽管机器人之前从来没有见过电话,团队可以告诉他目标的位置。不到三分钟,Atlas就站在我们面前拿着电话在假装打电话了。
此时,自动化似乎正取得成功。测试的部分任务会在断电情况下进行,因为在有些时间段机器人与他们的人工操作员不会有联系。对于完全依靠远程操作的机器人,这意味着失去关键的时间。理论上说,MIT团队的Atlas会继续尝试执行最近的指令——钻孔、拿起电话听筒。所以,MTI团队希望其他团队纵然能在诸如稳定性等其他方面优于自己,自己也能通过断电导航赢得最后的胜利。
稳定性
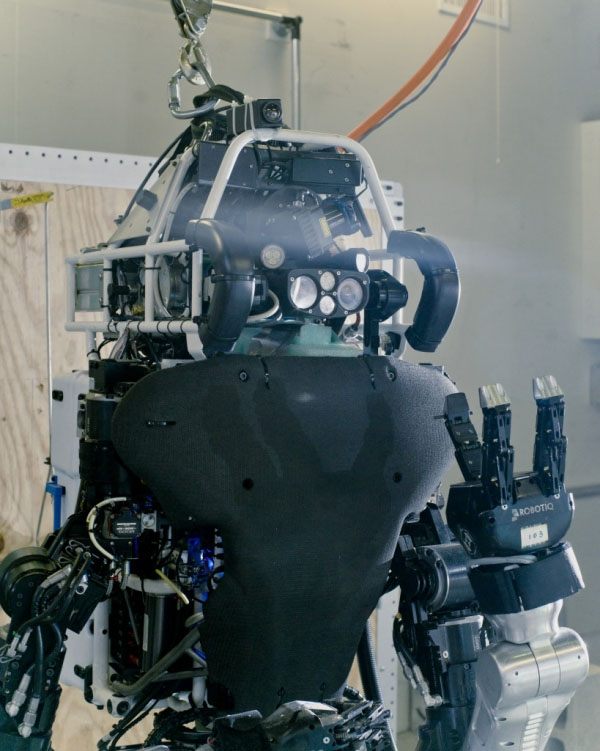
但是,对于Atlas以及其他的两足机器人,稳定性都是严重的问题。回想一下,人类花多长时间才学会走路——甚至伟大的机器人小说家艾萨克·阿西莫夫警告说,两足运动的“不平衡控制”是机器人研究真正的挑战。事实确实如此。在比赛中,不会有任何的安全绳。如果Atlas摔倒了怎办?在真正的比赛中如果摔倒肯定会遭遇失败,还有件没有完成的事是摔倒后如何爬起来,虽然机器人有能力爬起来,但是无论如何要让他站的更稳。
这是非常冒险的一步。一旦摔倒,Atlas就要离开测试区,重新校准,然后才能回到场地继续完成任务。Atlas没有保护性外壳,很脆弱,容易受损;有些团队的机器人使用车轮而不使用双腿移动。
在最终决赛上,这会影响Atlas的发挥。任务清单上唯一没有完成的就是上台阶。泰得瑞克和他的团队设计的软件程序可以让Atlas爬梯子,但是DARPA改变了比赛规则。泰得瑞克承认说,如果他早知道上台阶是必选项而穿越岩石区是可以选择的,他就给机器人装上轮子了。现在的Atlas完全靠双腿维持稳定性。
这一点在机器人尝试第一步时就得到了证明。
Atlas自信的完成了这三步的设置。在房间后部,Atlas三位人工操作员让机器人上台阶。马里恩通过弄清机器人的抽象数据并将其定义为一个具体的目标,帮助Atlas确定台阶具体的位置。巴伦苏埃拉使用Atlas的传感器确保他们会从适当高度上台阶。伊扎特核实准备工作一切就绪。马里恩将机器人可能的立足点标注在它内部的台阶地图上。机器人会给马里恩,发送一个动画,显示自己计划将要采取的路径,然后团队会摁ok键确认。Atlas抬起自己的腿,然后重心开始前移。
“嘣”,一声巨响。屏幕上,Atlas突然摔倒,从台阶上滚了下来。泰得瑞克一直在看着机器人的步伐,目睹了这一切。他大声叫道,“他的小腿骨受伤了!”支撑丝在台阶八字形的位置将Atlas吊在悬挂位置。
团队乱成一团;发生了什么?台阶都是有模式的。Atlas起始点很不错的。原来是立足点错了。团队让Atlas的脚与台阶边缘靠的太近。
泰得瑞克后来说,“这是我们看到的它走的最差的一次”。问题出在哪呢?Atlas有臀部。在演示中间的时候Boston Dynamics传出这个消息。这天早些时候,团队发出了一些解读;Atlas制造商让这三个工程师确保在6月5号比赛之前完全替换机器人的臀部部件。
那么可以肯定的是,Atlas在第一次尝试转动门阀之前所有组件都完美运行。虽然这点令人感到安慰,但是其他的比赛要求却并不令人满意:比赛那天,Atlas将必须独自在电池供电下运行。迄今为止,Atlas只在这种情况下运行过一个小时。团队并不知道机器人能坚持多长时间。
正确的问题
Atlas仿人设计的理念是,为世界或人类服务的机器人应该是人形的。比如,如果机器人将进入一个核电厂阻止核能外泄,由于机器人将要接触的那些按键和工具原本是为人类设计的,那么将机器人设计成人的高度和人的形状不会更好吗?
或许是的。履带轮比双腿更加稳定。“它动作笨拙,但是人类移动自如。生物的某些控制机制是科技远不能达到的。”这在某种程度上就是挑战的美。
测试结束时,巴伦苏埃拉说,“有时我觉得机器人很令人遗憾”。他有一个四个月大的儿子,从某方面说他的儿子比Atlas要更先进。Atlas可以行走,而他的儿子不能;Atlas可以驾驶而他的儿子16年内都不能;但他的儿子可以无需帮助而识别目标。Atlas可以使用激光和相机调查周围——比他四岁的儿子要更酷——但是他需要人工操作员解释数据的含义。
几天之后,Atlas将会被打包装进卡车,运到加州。他的人工操作员会在竞赛前一周和他会合。现在Atlas正紧紧的被吊在绳索上。
一个有趣的问题是,当它摔下来的时候有没感觉像是自己摔倒了?下周就没有支撑线防止机器人摔倒了,它必须得靠自己的双脚走路。
文章来源:雷锋网







