这个小机器人是iit的一个开源项目,它的名字叫iCub(i取自《我,机器人》里的i ;Cub取自于《丛林之书》的狼群养大的人类小男孩man-cub),身长104cm,体形跟一个5岁大的小孩差不多。四肢可以完成坐立等动作,眼睛和头部还可以跟踪运动中小球的移动轨迹。虽然这只是小小的进展,但从长远来看,机器人会一步一步地更加完善的。
*知识小扩展,以下内容引用自《Gaze Stabilization for Humanoid Robots: a Comprehensive Framework》
by Alessandro Roncone , Ugo Pattacini , Giorgio Metta and Lorenzo Natale
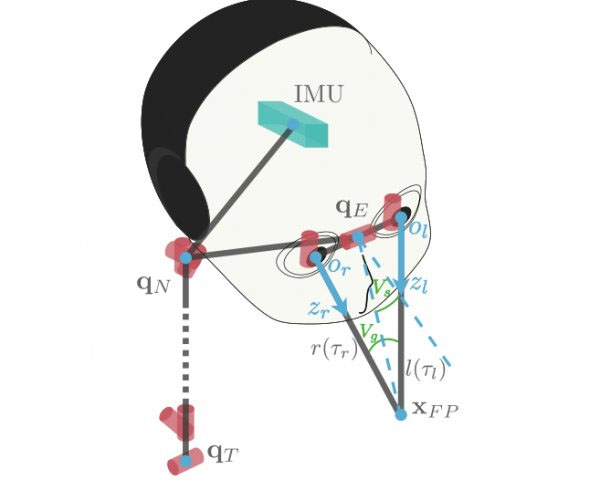
上图中Χfp 为机器人稳定三维定点, 向量Χfp为六维速度量, 包括线速度νfp和角速度ωfp ,通过控制摄像头,使摄像头与 Χfp相对速度为零。
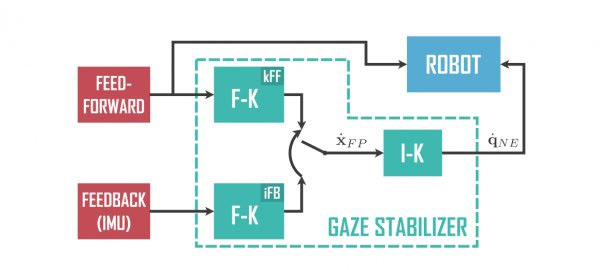
框图中的kFF 为运动前馈,机器人在运动过程之中,自身会产生运动扰动量,相应的电机命令会进行扰动量预测,进而使凝视系统更为稳定; iFB为惯性反馈,由IMU,即惯性测量单元来测量部分扰动。控制主要分为头部运动控制和眼部运动稳定控制。